ОТЧЕТ
О РАБОТЕ СЭК БТА В 2017г.
В течение 2017г. службой
эксплуатации были выполнены следующие работы:
1.
обеспечение плановых наблюдений на БТА, Ц-1000, выполнение
графиков ППР оборудования. Общее время работы БТА в наблюдательном режиме за 11
месяцев составило 1482,6 часов. Простои по техническим причинам 13,2 часа, из
которых: 9 ч – неисправность светоприемной аппаратуры, 1ч 45м –
неисправность Р2, 0,8 ч – отключение электроэнергии, 1ч 40м –
неисправность СМП.
2.
выполнялись графики ППР оборудования по узлам СУ, кабельному
хозяйству, собственно приводам (эл. двигатели
постоянного и переменного тока) на различных механизмах телескопа;
3.
установлены новые датчики давления для системы управления
насосными агрегатами маслопитания БТА.
4.
Модернизирован Главный испаритель камеры ВУАЗ-6 под новую систему
напыления на основе спиралей нового образца.
5.
по ТЗ САО РАН фирмой «Хилберг вакуумтехник» (Германия) проведена автоматизация
камеры ВУАЗ-6.
6.
Произведена серия тестовых напылений с
новой системой управления ВУАЗ-6, произведена оптимизация параметров, нанесено
покрытие на коллиматор спектрографа высокого разрешения с оптоволоконным
сочетанием для БТА
7.
произведена регламентная мойка металлоконструкций, ГЗ и вторичной
оптики БТА и Ц-1000;
8.
произведен ремонт козлового крана, деревянный настил заменен на
металлическую просечку ПВЛ
9.
произведено техническое освидетельствование крана К-100\52 для
предстоящих работ с ГЗ.
10. Получен
первый спектр на спектрографе высокого разрешения с оптоволоконным сочетанием
для Ц-1000 (совместно с лабораторией астроспектроскопии - ЛА);
11. Заменен
устаревший морально и физически привод поворотного стола. Новый привод выполнен
на основе оборудования Sinamics S120 компании Siemens.
12. измерение
(контроль) вертикальности оси "А" БТА и положения визирной оси
относительно датчика холла "Z" 0 гр. для внесения поправок в
коэффициент СКН и привязки ДОС "Z";
13. ведутся
работы по тарировке разгрузок ГЗ с целью формирования нужной формы поверхности
ГЗ (совместно с ЛОН).
14. Подготовлен
запасной комплект насосов для насосных станций, заменены регуляторы давления в
системе водоснабжения ВНПустранены аварии на
трубопроводе.
15. Восстановлено
забрало малой башни, сорванное порывом ветра.
Работа с кадрами
Новые сотрудники: Книгиницкий И. – механический участок
Неизвестный Н.С. – старший инженер,
участок АСУ, поступил в магистратуру СКФУ
Князев Н.Н. – инженер, механический
участок, поступил в магистратуру ИТМО
По капремонту в 2017 году работы не проводились.
КУПОЛ
Разработана
концепция троллейного токоподвода купола вместо
существующей капризной системы кабельного токоподвода
|
|
|
|
сейчас |
будет |



ГЗ – контроль
«Бугра» - более детально в отчете ЛОН

КРАН К-100 заменен деревянный настил,
требующий регулярной полной замены (раз в 5-7 лет) на металлическую просечку.
Подготовлен к монтажным работам с ГЗ.
|
|
|
|


ПОВОРОТНЫЙ СТОЛ П2
Привод П2 заменен в
начале июля 2017 года и в настоящее время находится в стадии опытной
эксплуатации. В случае необходимости существует возможность возврата к старой
системе. Датчик положения поворотного стола используется старый. В дальнейшем
планируется ввод в систему значений нового энкодера,
находящегося на оси двигателя системы Sinamics S120.
Система управления
приводом поворотного стола организована на основе оборудования Sinamics S120
компании Siemens.
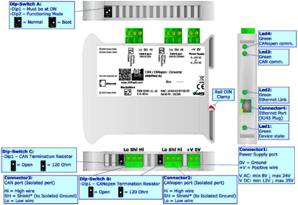
Система Sinamics S120
состоит управляющего модуля CU320-2DP с адаптером CUA31, силового модуля
PM340, коммуникационного модуля CAN
CBC10, базовой панели управления BOP20 и
блока питания SITOP PSU200M.
К системе подключен
синхронный электродвигатель SIMOTICS S 1FK7-CT, снабженный датчиком 20 бит (на
оборот) + 12 бит (многооборотный) с интерфейсом DRIVE-CLIQ (энкодер
AM20DQI). Подключение электродвигателя осуществляется при помощи силового
кабеля (оранжевый) и сигнального кабеля DRIVE-CLIQ (зеленый).
Для связи с системой
управления верхнего уровня по сети CAN используется сетевой
шлюз CAN/CANOpen компании ADF.
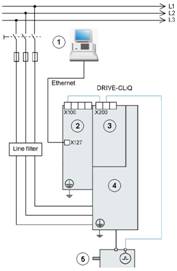
На рис представлена
блок-схема системы.
|
|
Схема системы Sinamics S120. 1 -
Компьютер-программатор 2 - Управляющий модуль 3 - Адаптер силового
модуля 4 - Силовой модуль 5 - Электродвигатель с
датчиком оборотов |
|
|
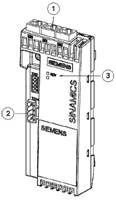
Управляющий модуль
системы Sinamics S120 1 - Интерфейсы
DRIVE-CLIQ 2 - Металлическая
полоса для подключения оплетки кабеля 3 - Клеммы цифровых
вводов-выводов 4 - Клеммы подключения
питания 5 - Разъем для
подключения плат расширения 6 - Разъем Profibus DP 7 - Светодиоды
индикации 8 - Разъем Ethernet 9 - Переключатели
адреса Profibus DP |

|
|
Адаптер силового
модуля системы Sinamics S120. 1 - Интерфейсы
DRIVE-CLIQ 2 - Клеммы подключения
питания 3 - Светодиоды
индикации |
|
|
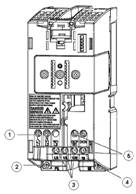
Силовой модуль системы
Sinamics S120. 1 - Подключение линии
питания 2 - Подключение
защитного проводника кабеля питания 3 - Подключение
электродвигателя 4 - Подключение
защитного проводника кабеля электродвигателя 5 - клеммы подключения
тормозного резистора |
|
|
Плата интерфейса CANOpen 1 - Разъем "
розетка" 2 - Разъем "
вилка " |

|
|
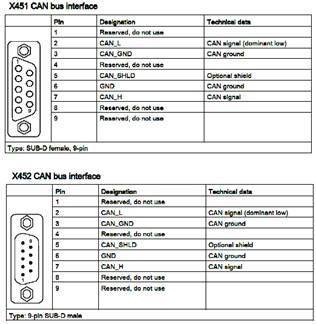
Расположение контактов
подключения шины CANOpen. |
|
|
Шлюз ADF CAN/CANOpen. |
Настройки подключения по
сети Ethernet
Для управляющего модуля Sinamics S120
(имеет выделенный адрес и может быть включен в сеть предприятия):
Сетевое имя: sim-cpf
Адрес IP: 192.168.2.137
Маска сети:
255.255.254.0
Для шлюза ADF
CAN/CANOpen (выделенного адреса не
имеет, подключение непосредственно к компьютеру-программатору):
Адрес IP: 192.168.2.10
Маска сети:
255.255.254.0
|
|
|
|
|
|

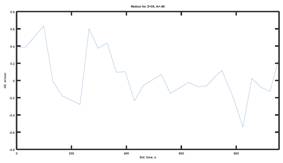
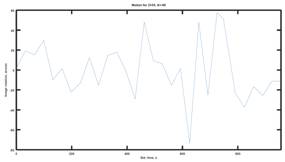
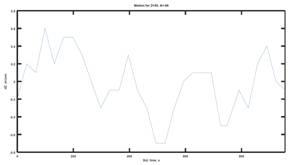
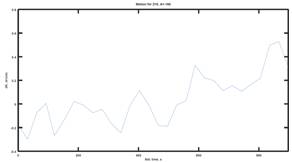
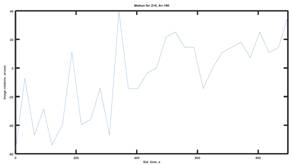
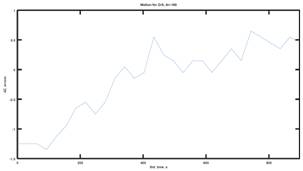
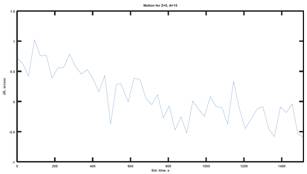
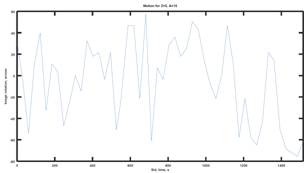
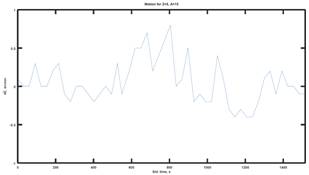
Графики зависимости
координат и угла вращения поля от времени для разных точек (максимальные и
минимальные скорости вращения P2).
east_dA
east_dAng
east_dZ.
north_dA.
north_dAng.
north_dZ.
south_dA.
south_dAng.
south_dZ
dA - уход по азимуту, dZ - уход
по Z, dAng - уход по параллактическому углу (для
сравнения, на масштабах матрицы Apogee смазывание
изображения на 1'' на краю поля будет при уходе по углу на 22'). Переменные
отсчитываются относительно медианного значения ряда.
Вывод на состояние 13
июля: с легкой камерой у нового привода проблем не возникло, необходимо
проверить с более массивной (и несбалансированной аппаратурой).
Точность позиционирования
P2 по углу не изменилась. Управляющая программа Емельянова делает максимум 5
итераций, P2 позиционируется с точностью 1-2'.
До конца августа привод
отработал безукоризненно. Некоторые наблюдатели не заметили замены привода.
В конце августа
выявлены проблемы с электромагнитной совместимостью аппаратуры привода П2 и
«МАНИЯ». На некоторых углах поворотного стола, при близком
расположении приемника КЧД к двигателю привода П2 в режиме ведения аппаратура
фиксирует помехи. Судя по всему, необходимо заэкранировать
узлы системы управления, но в первую очередь нужно укоротить подводящие силовые
кабеля (осложнено доступом в стакан, стакан первичного фокуса обычно занят
наблюдательной аппаратурой).
В начале декабря
силовой кабель был укорочен
21 сентября в результате
незакрепленного жгута аппаратуры «SCORPIO» произошла авария –
в главную червячную передачу попала пластиковая стяжка. Червячное зацепление в
это время находилось без защитного кожуха, т.к. кожух нуждается в
дополнительной доработке, новый привод выходит за его габариты. К счастью,
сработала защита привода по моменту. После удаления инородного предмета из
зацепления и перезагрузки системы привод заработал в штатном режиме.
Анализ реальных смещений поворотного стола
при выдаче команды "повернуть на
угол" с максимальной скоростью (из стандартной программы управления).
# Результаты измерений позиционирования P2 стандартной
программой управления (усреднение по 15 движениям)
# | Угол смещения | Реальное среднее смещение | СКО |
| +0.5 | 0.48378 | 0.00074 |
| +1 | 0.96943 | 0.00101 |
| -1 | -0.96899 | 0.00056 |
| +2 | 1.93935 | 0.00160 |
| -2 | -1.93933 | 0.00042 |
| +5 | 4.87003 | 0.00182 |
| -5 | -4.86956 | 0.00274 |
| +10 | 9.81689 | 0.00386 |
| -10 | -9.81401 | 0.00297 |
при движении поворотного стола итерациями со все
уменьшающейся скоростью, точности в 1-2'
можно добиться на 4-5 итерациях.
Судя по СКО, скорость выдерживается довольно
точно, "недостача" появляется из-за разгонов и торможений. И это даже
хорошо, потому что предыдущий двигатель, не имея тормоза, наоборот,
"переезжал" заданный угол и зачастую упирался в концевой выключатель.
Авторы (Якопов Г.В.,
Емельянов Э.В., Горшков В.В.* Евсюков А.В.*
*- НПО АСУТП) выражают
благодарность Шергину В.С., ДрабекуС.В., Синянскому С.И., ПритыченкоА.М., ДаниловуВ.Г. без помощи которых данная работа была бы
невозможна.
|
|
|


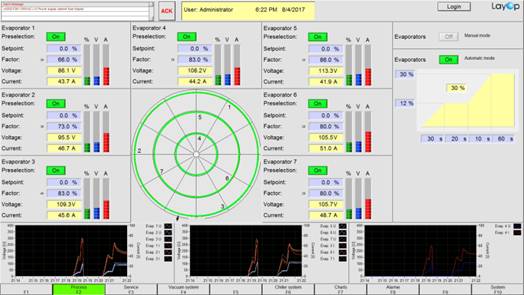
ВУАЗ-6
Интерфейс
новой системы управления. Достигнута воспроизводимость
результата. Процесс напыления полностью автоматизирован. Необходима серия
экспериментов для оптимизации режимов. Осложнено высокой стоимостью
эксперимента – одна загрузка камеры порядка 200 т.р. и большими
трудозатратами – один эксперимент это работа практически всего коллектива
СЭК в течение недели.
Управляющий
шкаф новой системы управления

Тлеющий
разряд (ионное ассистирование подложки)
Процесс
напыления

Результат (Коллиматор
для большого спектрографа с оптоволоконным сочетанием)

графики последних измерений
образцов-свидетелей от 18 октября 2017 (коллиматор большого спектрографа)
и измерений от 30 июня 2016
(алюминирование ГЗ БТА)
в каждом измерении исследовались 2
образца-свидетеля, расположенные в разных зонах камеры.
из графиков можно сделать
следующие выводы:
1) есть к чему стремиться - до
"теоретического" коэффициента отражения алюминия еще далеко
2) виден прогресс, т.е. технология
совершенствуется.
3) К отражения ГЗ
неудовлетворительный (было еще хуже)
4) и самое важное - результат на
первом графике воспроизводимый, в отличие от случайного на втором
Новый
испаритель. Видно, что алюминий выпарился не полностью, но при большем значении
тока увеличивается риск образования капель. Необходим тщательный подбор
режимов.

СПЕКТРОГРАФ Ц-1000
Получен
первый свет



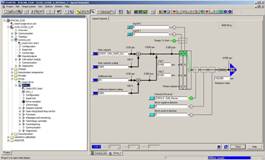
Программа удаленного
контроля и управления стационарной частью спектрографа высокого разрешения с
оптоволоконным сочетанием для телескопа Ц-1000
Программа
контроля и управления спектрографа состоит из двух основных частей:
·
Пользовательский
Графический Интерфейс
·
Программа Контроля и
Управления.
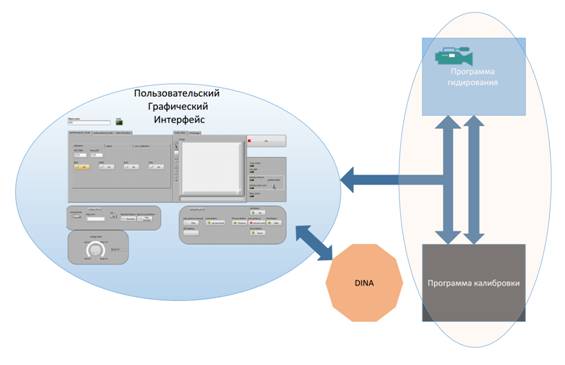
Поскольку
прибор состоит из двух основных частей - головная и стационарная (см. описание
программы головной (навесной) части спектрографа) соответственно контроль и
управление стационарной частью так же включает в себя программу гидирования и
программу калибровки.
Блок
схема программы приведена ниже.
Головная
и стационарная программы запускаются после подачи питания на контроллеры
cRIO-9067 и cRIO-9073 соответственно. После запуска контроллеров, программы
находятся в режиме ожидания до тех пор, пока с внешней программы пользователя
не послали команду(ы) на выполнение какой-либо
заложенной функции. Программы для головной и стационарной части не имеют
графического интерфейса, так как работают в полуавтоматическом режиме и не
требуют операторского контроля.
1.
Головная программа.
Программа гидирования выполняет несколько
основных функций;
· Сбор данных с видео камеры Рис 1.
· Обработка видеоизображения на ПЛИСе Рис 2.
· Обнаружение координат источника в зоне видеозахвата.
· Корректировка (гидирование)
источника в зону ввода в оптическую линию (FO)
· Калибровка средней позиции отклоняюшей
системы ШД1 и ШД2 Рис 4.
· Управление турелью Рис 5.
o
Выставление в Нулевое
положение
o
Выставление в положение
Калибровка
o
Выставление в Рабочее
положение
· Комуникация с
основной программой.
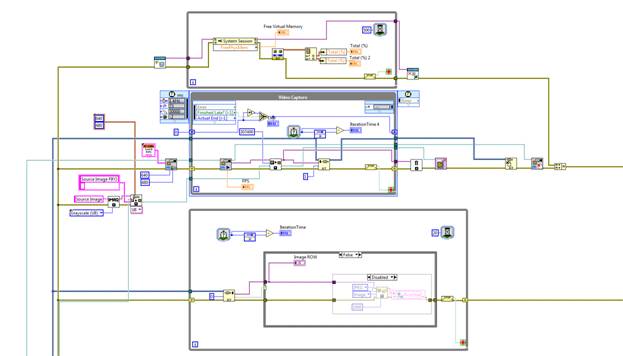
Рис 1. Блок диаграмма программы видео граббера и передачи изображения на основную программу и на
ПЛИС.
Центрирование
и последующее гидирование, а также управление
фазосдвигающими пластинами, анализатором поляризации и калибровочной призмой
производится шаговым двигателем. Преобразованный видеосигнал поступает на
центральный процессор, откуда передается на ПЛИС где идентифицируется
максимально яркая звезда. Там же вычисляется её координаты. Вычисление
координат происходит за рекордно короткий промежуток времени. При наличии на
кадре до 20 звезд координаты звезды максимальной яркости вычисляется за 3.5мс,
что в 20 раз быстрее преобразования самого видеоизображения. Программа
отслеживает изменения координат максимально яркой звезды и при помощи шаговых
двигателей подстраивает эти координаты к координатам предварительно введённым
оператором.
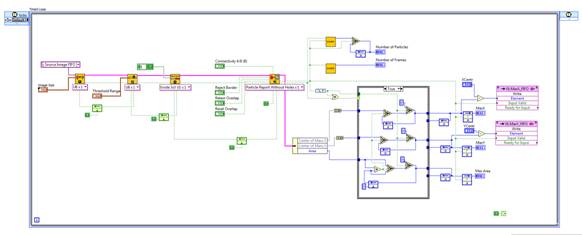
Рис 2. Блок диаграмма программы обработка
видеоизображения на ПЛИС
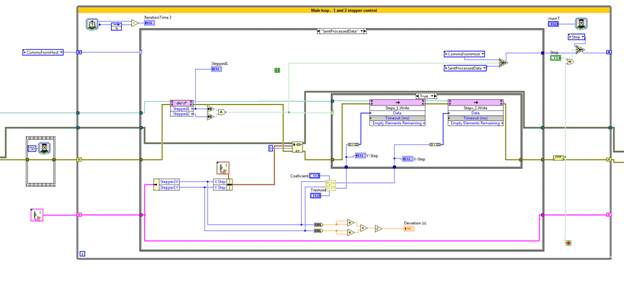
Рис 3. Блок диаграмма программы управления и
шаговыми двигателями автогида
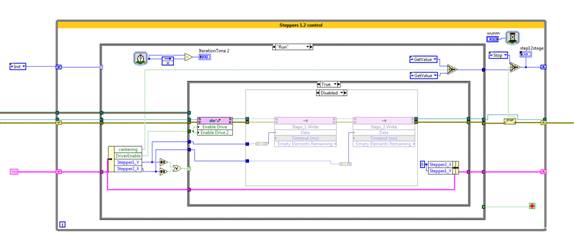
Рис 4. Блок диаграмма программы калибровки
средней позиции автогида
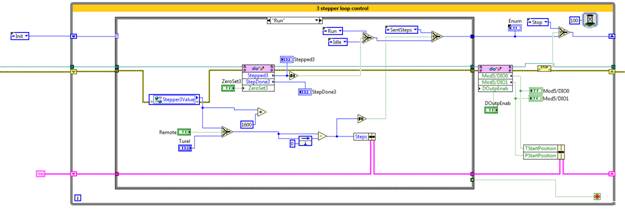
Рис 5. Блок диаграмма программы управления
турелью.
2.
Программа стационарной части.
Программа управления стационарной частью
включает программу калибровки. Устройства выполняет следующие функции:
· Контроль (включение, выключение) калибровочных ламп (ЛПК,
галоген)
· Управление положением шторок аттенюатора
· Управление положением градиентного фильтра (линейной
каретки)
· Управление обьективом
o
Фокусировка
o
Диафрагма
· Комуникация с
основной программой
Рис
5. Блок диаграмма программы стационарной части.
Программа
стционарной части выполнена по методу командного
управления. Команды принимаются по протоколу TCP/IP с использованием функций
STM. Каждая команда, посланная оператором, имеет свою подпрограмму, после
выполнения команды и проверки состояния формируется ответ и посылается
оператору.
Основная программа.
программа пользователя выполняет и имеет следуюшие функции:
· Инициализация всех управляемых механизмов
o
Автогид (два шаговых
двигателя)
o
Поляриметр (турель, один
шаговый двигатель)
o
Калибровочные лампы (2
релейных выхода + 2 резервных)
o
Каретка градиентного
фильтра (один шаговый двигатель)
o
Аттенюатор (турель, один
шаговый двигатель)
o
Объектив (посредством
протокола SPI).
· Выбор и выставление координат захвата гидирования
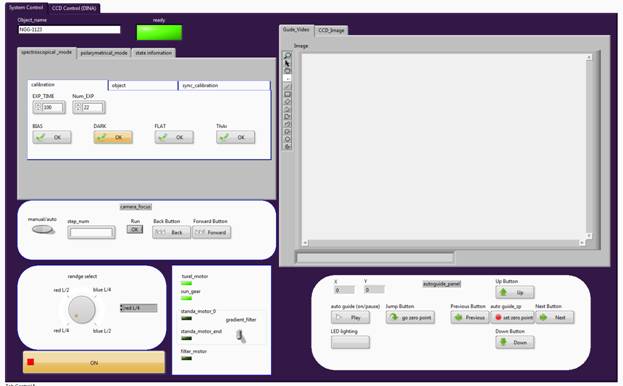 Рис 8. Графический интерфейс пользователя,
контрольная часть спектрографа
Рис 8. Графический интерфейс пользователя,
контрольная часть спектрографа
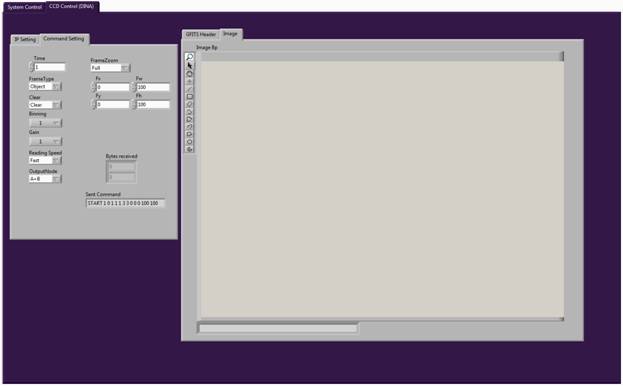
Рис
9. Графический интерфейс пользователя, контрольная часть CCD-DINA матрицей.
Программы
комуницируются постредством
TCP/IP протокала через функции STM .
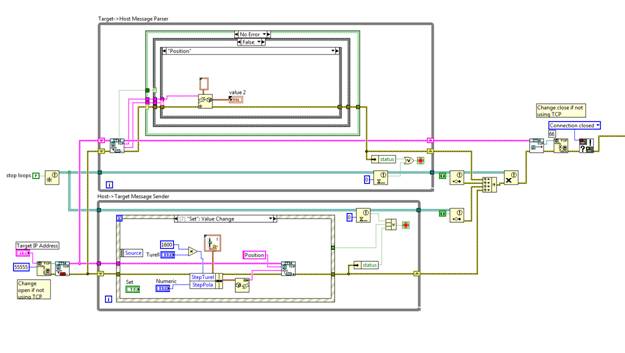
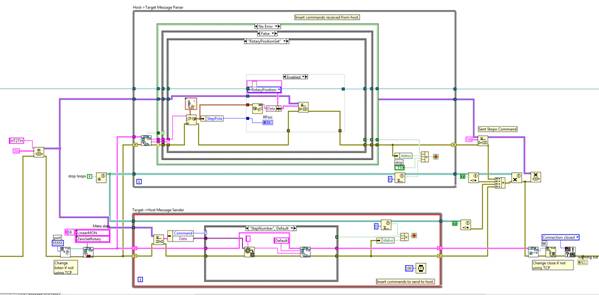
Рис
7 Блок диаграмма программы управления спектографом
Комманды осуществляются по принципу - команда от
оператора - ответ на выполнения от устройства, а данные от устройсва
по принципу - запрос от оператора на параметр - ответ от соответсвуюшего
устройства. Такое решение позволяет расширять количество команд и даст
возможность иметь несколько командных интерфейсов.
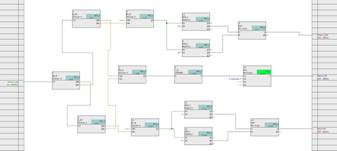
Из
блок диаграммы видно, что программа имеет два цикла, приемный цикл верхний (Target -> Host Message Parser) и передаюший, нижний (Host -> Target Message Sender). Для обеих циклов использован один порт связи через
TCP/IP протокол. В данной программе использован порт номер 55555.
Программа управления CCD
матрицей
Управление
CCD матрицей происходит через программу DINA, является подпрограммой и может
работать независимо от программ управления спектографом
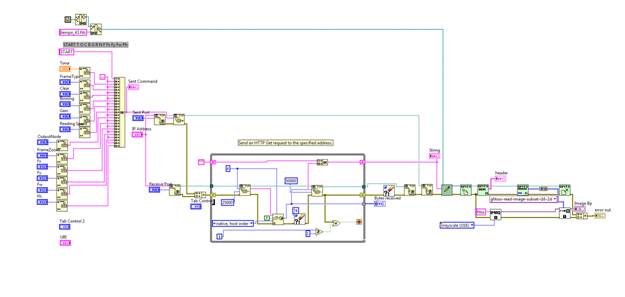
Рис
10. Подпрограмма управления CCD матрицей.
Подпрограмма управления CCD матрицей
формирует текстовую последовательность параметров для матрицы и посредством
TCP/IP протокола через порт 1568 отправляет запрос в программу DINA. Через порт
1567 получает ответ текстовую и бинарную последовательность в формате стандарта
GFITS. После обработки принятой информации на панеле
пользователя индуцируется параметры кадра и изображение CCD матрицы.
СМП (Данилов
В.Г., Неизвестный Н.С.)
Обоснование
работ по СМП в 2017г.
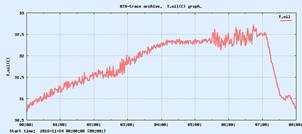
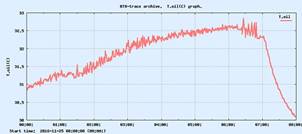
О текущем состоянии (январь 2017г,) системы маслоохлаждения и аварийных ситуациях, вероятно вызываемых
перегревом масла и о проблеме вибраций при включении/выключении СМП
Пояснения по сбоям работы приводов А, Z
Проводимые наблюдения за изменением температуры
масла в системе при работе телескопа показали недостаточную эффективность
системы масло-охлаждения в текущем ее виде/состоянии.
При
хороших погодных условиях, когда наблюдения проводятся полные ночи в течение
нескольких суток подряд, замечено, что масло, не успевая остыть за день и резко
нагреваясь в процессе работы телескопа, к концу наблюдательной ночи достигает
все новых температурных пиков.
Так
23.11.16 и 24.11.16 утром после длительных наблюдений (и долгого ведения
объекта), при перегоне телескопа в «горизонт» произошли сбои работы
приводов А, Z (графики см. ниже).
Одна из версий причин - неравномерный нагрев
сферы горячим маслом в районе подушек во время длительного медленного ведения
объекта и при быстрой смене положения телескопа подушки выходили на менее
нагретую часть сферы и, возможно, происходили колебания толщины масляной
пленки, что в свою очередь могло вызвать кратковременные сбои в работе приводов/контроллеров.
Оба случая произошли при температурах масла
примерно +32,5 градусах Цельсия, до этого температура не поднималась так
высоко, только с 23 по 25е фиксировалась подобная температура, 2 из 3-х дней
были с нештатными ситуациями (25.11.16 под конец наблюдений часто менялись
объекты - косвенно укладывается в версию с нагревом сферы). Можно предположить что, как минимум косвенно, в
аварийных ситуациях «виноват» перегрев масла. При этом следует учитывать и обстоятельство,
связанное с нагретым маслом — увеличение турбулентных потоков воздуха,
охватывающих телескоп, что может негативно влиять на качество изображений во
время наблюдений.
Требуется
замена теплового насоса и/или пересмотр системы охлаждения СМП (как вариант
использование контуров проточной холодной воды).
Пояснения по вибрациям при включении СМП
Низкоамплитудные механические вибрации телескопа при включении СМП наблюдаются давно и имеют регулярный характер. Наиболее вероятной причиной вибраций является гидроудар при включении СМП. Были выявлены некоторые состояния маслосистемы, при которых особенно сильны гидроудары. При остановке СМП после длительной работы (масло нагрето сильно), предположительно, часть масла в системе охлаждается быстрее основного резервуара (прохождение по холодным трубам), что видно по временному уменьшению температуры масла при включении СМП (попадание охлажденного масла из системы в резервуар), после чего уже происходит практически линейный постоянный нагрев.
В моменты прохождения по системе неравномерно охлажденного масла при включении СМП замечены интенсивные вибрации в системе (возможно гидроудар усиливается из-за разной плотности разнотемпературного масла в системе).
Требуется провести
детальный анализ режимов работы СМП, подготовить рабочую модель. Изменить
настройки ЭРИКов и/или принципиальную и монтажные
схемы.
Пояснения по вибрациям при выключении СМП
При текущей схеме при выключении оператором СМП
происходит одновременное отключение от питания ЭРИКов.
Независимо от настроек торможения – по факту происходит практически
мгновенная остановка приводов, что в свою очередь вызывает достаточно сильный
«реверс» по А – происходит обратное вращение лопаток и гидроудар.
Требуется
пересмотреть схему подключения/работы ЭРИКов для
корректной отработки режимов плавного торможения приводов.
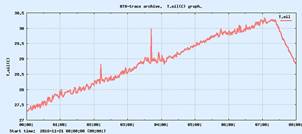
Приложение
Температура масла во время наблюдений с
21.11.16 по 25.11.16 (сбои в работе приводов были утром 23,24 го ноября):
|
|
|
|||
|
|
|

Лог
работы телескопа 23 ноября:
07:15:25.639 Вв:
A=-45 59 40.00 Z=+79 59 0.00
07:15:25.639
Старт наведения на A/Z-положение
07:15:25.639
В Горизонт
07:15:35.448
Кнопка "Пуск" телескопа
07:15:35.648
Разрешаем SEW-мотор3
07:15:35.648
Разрешаем SEW-мотор1
07:15:35.848
SEW-мотор3 Разрешён!
07:15:35.848
SEW-мотор1 Разрешён!
07:15:45.456
Баланс.грузы движутся.
07:16:09.678
Баланс.грузы остановились.
07:16:52.316
Останов купола (+135 12 8.27)
07:17:17.939
Купол малая скор. в +
07:17:55.573
Останов купола (+135 07 26.36)
07:18:36.209
SEW-мотор3 Блокирован!
07:18:36.209
SEW-мотор1 Блокирован!
07:18:37.210
SEW3:Нет готовности!
07:18:41.314
SEW-мотор2 ВЫКЛ!
07:18:42.014
SEW-мотор3 ВЫКЛ!
07:18:46.518
SEW-мотор1 Разрешён!
07:18:51.923
SEW2:Вкл.Старт!
07:18:52.623
SEW3:Вкл.Старт!
07:18:57.928
Сбрасываем SEW-контроллер3
07:18:58.128
SEW-мотор3 БыстроСтоп!
07:18:58.228
Разрешаем SEW-мотор3
07:18:58.428
SEW-мотор3 Разрешён!
07:18:59.729
SEW-мотор3 Блокирован!
07:18:59.829
SEW-мотор1 Блокирован!
07:19:01.631
SEW-мотор1 Разрешён!
07:19:09.338
SEW-мотор2 Блокирован!
07:19:09.438
Блокируем SEW-мотор2
07:19:10.239
SEW-мотор3 Ошибка87!
07:19:10.239
тайм-аут FieldBus
07:19:10.339
Сбрасываем SEW-контроллер3
07:19:10.339
SEW-мотор3 Разрешён!
07:19:10.439
Разрешаем SEW-мотор3
07:19:10.539
SEW-мотор3 БыстроСтоп!
07:19:10.639
SEW-мотор3 Разрешён!
07:19:12.941
SEW-мотор1 Блокирован!
07:19:13.041
SEW-мотор3 Блокирован!
07:19:14.943
SEW-мотор1 Разрешён!
07:19:17.745
Стоп телескопа
07:19:18.046
SEW-мотор1 Блокирован!
07:19:20.247
SEW-мотор1 Разрешён!
07:19:21.749
SEW-мотор1 Блокирован!
07:19:25.352
SEW-мотор2 ВЫКЛ!
07:19:25.452
SEW-мотор1 Разрешён!
07:19:26.953
SEW-мотор1 Блокирован!
07:19:28.255
SEW-мотор1 Разрешён!
07:19:29.756
SEW-мотор1 Блокирован!
07:19:31.357
SEW-мотор1 Разрешён!
07:19:32.859
SEW-мотор1 Блокирован!
07:19:33.759
SEW-мотор1 Разрешён!
07:19:35.961
SEW2:Вкл.Старт!
07:19:38.263
Блокируем SEW-мотор1
07:19:38.464
SEW-мотор1 Блокирован!
07:19:38.864
SEW-мотор3 Ошибка87!
07:19:38.864
тайм-аут FieldBus
07:19:38.964
Сбрасываем SEW-контроллер3
07:19:38.964
SEW-мотор3 БыстроСтоп!
07:19:39.064
Блокируем SEW-мотор3
07:19:39.264
SEW-мотор3 Блокирован!
07:19:47.872
SEW-мотор1 БыстроСтоп!
07:19:47.872
Блокируем SEW-мотор1
07:19:48.172
SEW-мотор1 Блокирован!
07:19:50.074
SEW-мотор2 Блокирован!
07:19:50.174
Блокируем SEW-мотор2
07:19:50.774
Сбрасываем SEW-контроллер3
07:19:50.975
SEW-мотор3 БыстроСтоп!
07:19:51.075
Блокируем SEW-мотор3
07:19:51.275
SEW-мотор3 Блокирован!
07:23:13.946
Перекл. режим:
"Автомат"=>"Пульт"
07:26:07.693
Пульт: Старт A (VA=-2.0'/сек)
07:26:07.793
Разрешаем SEW-мотор1
07:26:07.993
SEW-мотор1 Разрешён!
07:26:09.294 PEP-A: Сбой кода?!
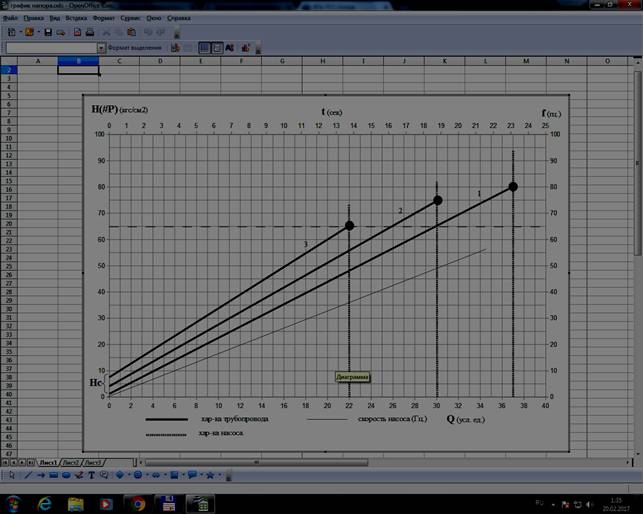
А. Рабочая точка насоса и системы маслопитания Z при пуске.
Рис. 2.
На рис.
2. приведены три экспериментальные зависимости вида Н=f(Q),
где Н — напор(м) , а Q
– расход масла (л/с) условно. Для их построения использовались графики рис.
1, которые были получены на основе измерения скорости резервного насоса Z и
давления Р масла в напорном трубопроводе.
Рабочие
точки 1,2 и 3 являются результатом пересечения двух упрощенных
напорных характеристик: винтового насоса, графиком которого есть вертикальная
прямая, и трубопровода — наклонная прямая. Нс — начальный
напор в трубе.
Учитывая,
что все три характеристики сняты в интервале от t=14h40m до t=17h30m, то
есть, при постоянных температурах масла (t°м= +12°C) и подкупольного
(t°п/к=
-5°С), можно
предположить постоянство вязкости масла в данном интервале. Из-за этого
предположения упрощенные прямые характеристик трубопровода на рис. 2
были проведены параллельно, а не из одной точки, и, так как Нс = (5÷8) бар,
то характеристика №1 получает самый низкий уровень Нс, что
объясняет самый большой расход масла (смотрите кривую 1 разгона насоса
Z
на рис.1).
Вывод.
Работа
маслосистемы Z
БТА включает несколько циклов запуска, которые отличаются разгонными
характеристиками привода насоса Z (Рис. 1), то есть, цикл разгона по кривой 1 характеризуется
более длительным запуском, а значит большим расходом масла. При этом
давление в пике достигает максимальных значений(Р=80бар). Последовательность
циклов следующая
– первый цикл - первое включение
СМП - максимальный по времени разгон(F=37Гц) – наиболее вероятная ситуация возникновения гидроудара при t° ~ 27°C;
–
следующий
цикл зависит от длительности предыдущего и характеризуется более коротким
разгоном(F=22Гц)
и более плавным набором давления масла за более короткое время;
–
короткий
цикл, который имеет самое малое время разгона и набора давления (кривые 3 на
рис. 1).
Замечания.
1.
При
существующей настройке ПЧ(ERIC) имеет место значительное перерегулирование в
автоматизированной системе маслопитания (Рис. 1).
2.
Наклон
разгонной характеристики(2Гц/сек.) при t°=+27°C провоцирует возникновение гидроудара по Z (см. Рис. 3).
3.
Давления, измеренные манометрами и тензодатчиками давления,
отличаются в принципе. О датчике давления в обратной связи информация неполная.
4.
При
выключении СМП происходит аварийное торможение привода насоса А, что вызвано
некорректной блокировкой выхода резервного ПЧ А, резкое торможение привода
насоса Z
возможно вызвано состоянием трубопровода.
Б. Гидравлический удар в гидроподушках
горизонтальной оси.
Рис. 7
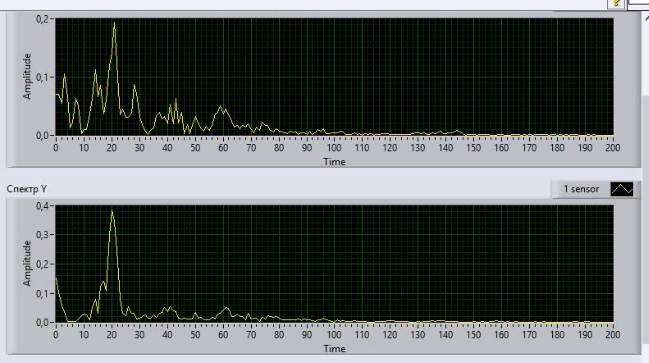
Рис. 8.
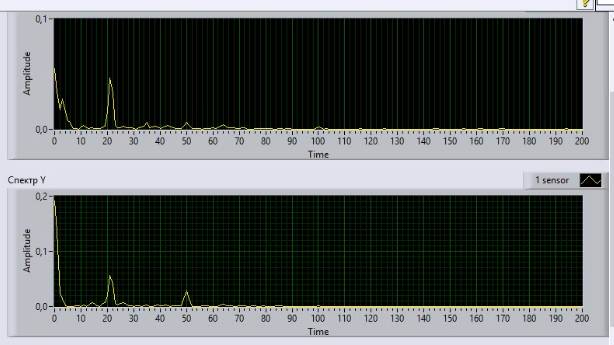
На рис.
7 представлена осциллограмма гидроудара на платформе
Н1 БТА, а на рис. 8 - типичная осциллограмма включения СМП на платформе Н1
практически без гидроудара. По вертикали задана
условная амплитуда ускорения(усилия), по горизонтали — частота в герцах.
Из осциллограмм видно, что максимальное ускорение при гидроударе
наблюдается в направлении оси Y акселерометра (Спектр Y), а это
направление совпадает с направлением горизонтальной оси БТА. Вся энергия гидроудара сосредоточена на частоте F=20Гц, что
характерно для автоколебаний давления в трубопроводе длиной L~20м и
температурой масла t°=27°C при низкой
вязкости (Бушуев В.В. 1989
Гидростатическая смазка в станках.).
Нач.
комплекса БТА Г.Якопов