Отчет ст. научного сотрудника отдела информатики
Шергина В.С. за 2012г.
1 декабря 2012 г.
Для обеспечения надежной работы БТА осуществлялось сопровождение МО АСУ, инструментальной автоматизации, видео-наблюдения, интерфейсов пользователей:
Непрерывное наблюдение за текущей работой систем для обнаружения проблем в МО, в аппаратуре, в действиях персонала АСУ и наблюдателей.
Регулярная коррекция МО для разрешения замеченных проблем и учета рекомендаций персонала и наблюдателей.
Консультационная помощь персоналу АСУ в нештатных ситуациях.
Поддержка в постоянной готовности резервной системы управления (точной копии управляющей системы).
Установка клиентской части МО АСУ на новые компьютеры и консультационная помощь наблюдателям.
Консультационная помощь другим разработчикам программ со связью с АСУ БТА.
До 2008-го года контроль точности наведения и получение поправок в первичном фокусе делались при помощи телевизионной системы. После 2008-го года эта система уже не функционировала, соответственно и контроль четыре года не проводился, а система управления работала с коэффициентами СКН полученными в октябре 2008-го.
При наезде в конце апреля с. г. телескопом на препятствие защитные муфты в приводе A сработали, а в приводе Z — нет. В следствие этого произошло необратимое смещение подвески червяка Z и телескоп стал наводиться неправильно. Встал вопрос о разработке новой технологии получения поправок наведения для определения коэффициентов СКН. Особенно этот вопрос обострился когда группа наблюдателей заставила службу эксплуатации БТА подвинуть (т.е. разъюстировать?) главное зеркало телескопа для лучшего наведения.
Было предложено использовать в качестве тестового приемника CCD-камеру Apogee Alta U16M с программой управления разработанной Э.Емельяновым под ОС Linux. Программа имеет простой строчный интерфейс и выдает FITS-файлы с параметрами АСУ БТА в шапке. Это позволяет максимально автоматизировать процесс технических наблюдений.
Был разработан комплекс программ для использования в скриптах под ОС Linux.
bta_apogee — программа основана на алгоритмах разработанных в прошлом году для программ быстрой привязки звезд на снимках получаемых на CCD-камере Цейс-1000 (zdina_wcs_fix) и SCORPIO БТА (scorpio_wcs). Она производит вычитание фона и выделение объектов, затем происходит обращение по протоколу HTTP к каталогу GSC-2.3 на местном сайте base1.sao.ru и формирование списка каталожных объектов в области снимка. По этому списку формируется модельное изображение с привязкой к определенным заранее пиксельным координатам центра вращения П2, которые задаются в параметрах вызова. С помощью FFT-корреляции модельных изображений ищутся сначала масштаб и угол поворота, а затем координатный сдвиг между списками объектов снимка и каталога. Полученное пиксельное смещение (относительно центра вращения П2) переводится в угловые секунды по осям A/Z и RA/Decl. Формируется и записывается в файл строчка таблицы поправок. Дополнительно может быть сформирован выходной FITS-файл с WCS-привязкой. Также формируется JPEG для визуального контроля качества совмещения объектов каталога с изображением:
bta_ty2 — программа обращается по протоколу HTTP к каталогу Tycho-2 на местном сайте base1.sao.ru и находит звезду ближайшую к заданному A/Z-положению, RA/Decl координаты звезды переводятся из эпохи каталога на видимое место (с учетом собственных движений) и отсылаются в АСУ, затем, если введен пароль операторского уровня, телескоп перенаводится на новый объект.
bta_focmove — программа установки положения фокуса, параметром указывается либо величина сдвига, либо новое положение, либо текстовый файл с таблицей фокусировки. В последнем случае новое положение вычисляется при помощи аппроксимации таблицы параболой. Программа сама выбирает скорость движения и в случае грубой установки на большой скорости дополнительно подводит на малой.
imqual — программа анализирует качество изображения в FITS-файле, для этого она выделяет несколько достаточно ярких (но неперекопленных) объектов и определяет по ним размер изображений. На выход выдает строчку для таблицы фокусировки. Если в шапке отсутствует правильный параметр масштаба (IMSCALE), его можно задать при вызове.
bta_p2move — программа позволяет поворачивать поворотный стол СПФ (П2) на указанный угол.
rot_center — программа определяет центр поворота между двумя отождествленными изображениями с WCS-параметрами в FITS-шапках (т.е. исходные изображения должны быть предварительно обработаны bta_apogee). Используется для определения центра вращения П2.
bta_tabhdr — программа формирует шапку таблицы поправок с текущими коэффициентами СКН.
Технические наблюдения производились на компьютере bgd.sao.ru установленном в СПФ. В процессе наблюдений совместно с Э.Емельяновым были разработаны и отлажены следующие shell-скрипты:
автоматическая фокусировка;
получение набора кадров с поворотом П2 (всего на 180º);
привязка повернутых снимков, перебор всех пар расстоянием по углу более 90º и определение центра поворота для них, вычисление среднего центра вращения П2;
получение таблицы поправок: для 8-ми положений по азимуту (через 45º) и 7-ми по Z (через 10º, т.е. всего 56) выбираются ближайшие звезды, перенаводится телескоп, снимается кадр, отождествляется, получается смещение dA,dZ, добавляется строчка в таблицу поправок.
Процесс фокусировки занимает 2-3 минуты, определение центра вращения П2 занимает около 10-ти минут, процесс из 56-ти перенаведений для получения таблицы поправок занимает немного менее 2-х часов.
Формат таблицы поправок в точности повторяет прежний чтобы применять прежнюю программу (bta_xlsqm) подбора коэффициентов СКН.
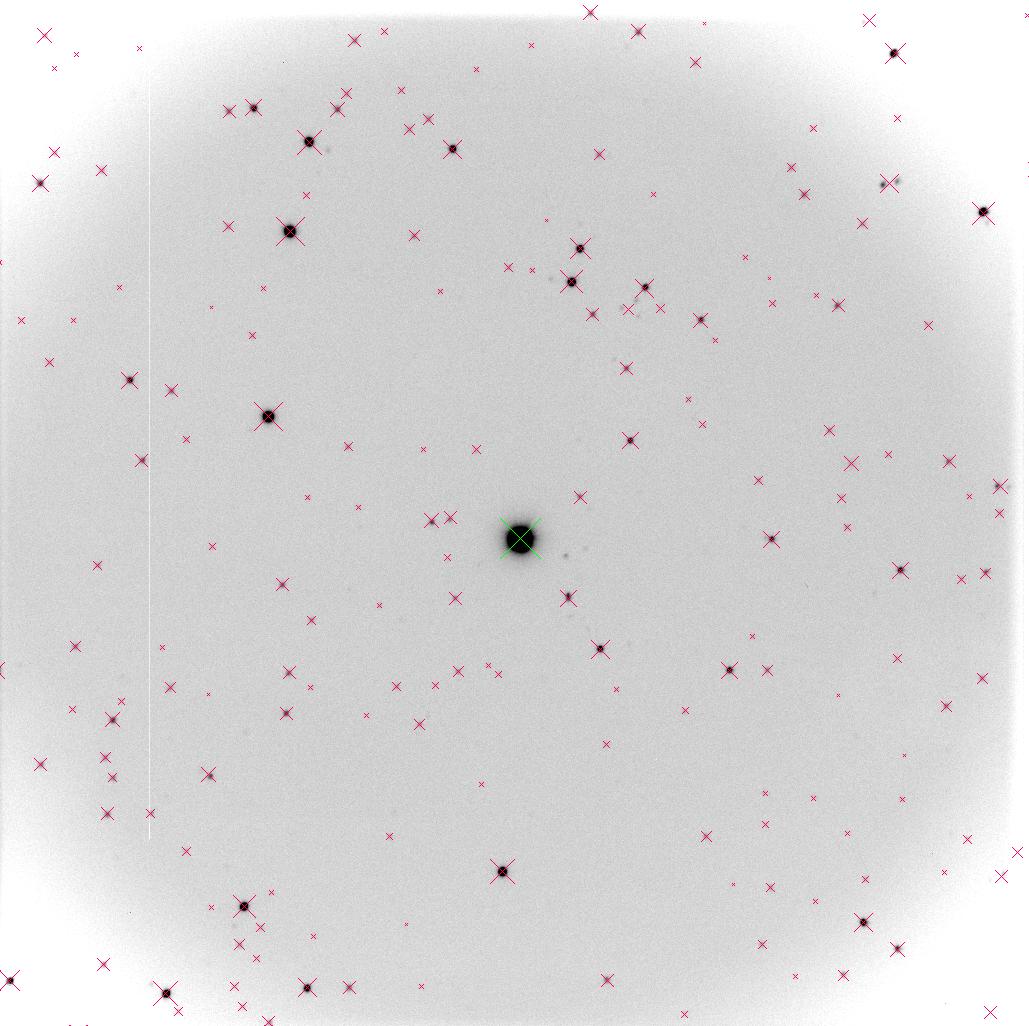
Всего было проведено три сета наблюдений в технические ночи: 27 сентября, 28 октября и 24 ноября.
Основные результаты:
найдено изменение в положении вертикальной оси вращения 1.5-2" за 4 года;
сформированы и введены в систему управления коэффициенты СКН для ПФ, для Н2 теоретически изменены коэффициенты вертикальности и нулей по данным для ПФ;
в октябрьском сете замечена возможность нестабильного положения по A до 5";
смещение всех поправок от сентября к октябрю на 6" по A и на 4" по Z по-видимому объясняется последней «подвижкой» главного зеркала в начале октября, от октября ноябрю поправки сохранились довольно неплохо.
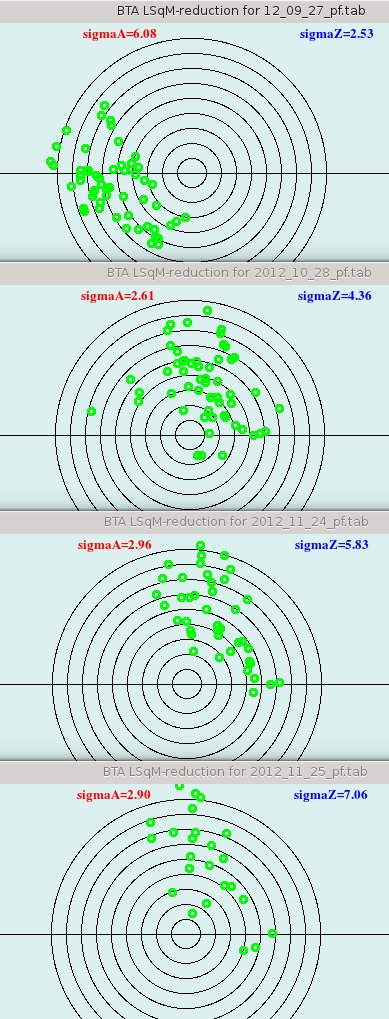
На
рисунке вверху сентябрьские поправки,
ниже — октябрьские, два нижних —
ноябрьские в начале и в конце наблюдений.
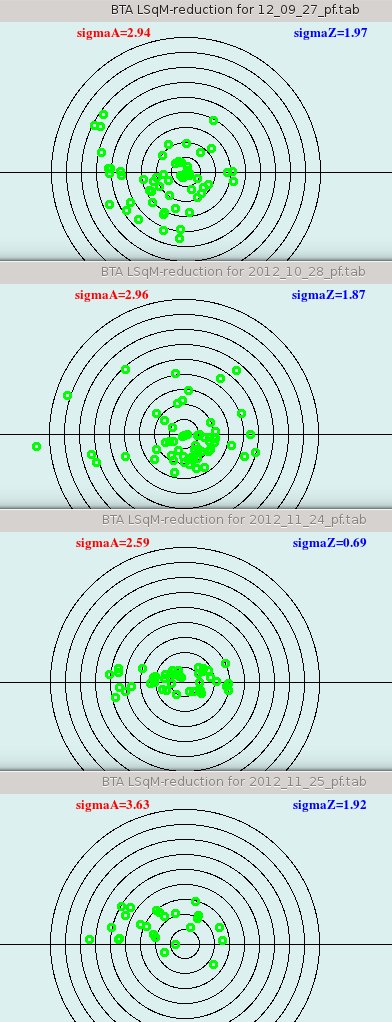
Слева исходные поправки со старым СКН,
в центре после подбора коэффициентов.
Меньший разброс по вертикали в ноябре
объясняется тем что из-за худшей погоды
ниже 60º не наводились.
Большее количество более точных данных позволило заняться определением «формы» главного червячного колеса азимута, т.е. первой (эксцентриситет) и второй (эллиптичность) гармоник. Для этого разработан специальный вариант программы bta_xlsqm. С ее помощью подобрана корректирующая формула:
![]()
Справа на рисунке результат ее применения к таблице поправок.
Как итог корректирующая формула вставлена в управляющую программу АСУ.
Были продолжены работы по новой системе управления телескопом.
В течении 2011-го года было произведено пять сетов технических наблюдений с CCD-фотометром для получения изображений по всему небу с целью разработки в дальнейшем модели наведения (pointing model), т.е. системы поправок телескопа для точного наведения по координатам и сопровождения объектов.
Обработкой снимков и построением таблиц поправок по каждому сету занимался Т.Фатхуллин. Попытки (и его, и мои) строить формулы коррекции по таблицам отдельных сетов тогда успехом не увенчались. В этом году эта работа была мной продолжена.
Все снимки были переобработаны при помощи разработанной в прошлом году программы zdina_wcs_fix (привязка звезд на изображениях CCD-камеры Цейс-1000). Получены новые таблицы поправок. Они были проверены на возможные ошибки сравнением с результатами Фатхуллина. Затем поправки каждого сета были смещены так чтобы соответствовать друг другу в районе экватора и меридиана. Таким образом была получена общая таблица из ~200 поправок.
В процессе поиска корректирующих формул было написано около десятка вариантов программы подбора коэффициентов методом наименьших квадратов (zeiss_lsqm) . В конце концов удалось разработать формулы более ли менее хорошо (σ≈5") аппроксимирующие общую таблицу. Они основаны на классических для экваториальных монтировок (см. например: http://www.tpsoft.demon.co.uk/pointing.htm) плюс гармоники за эксцентриситет и эллиптичность главных червячных колес:
![]()
![]()
где
![]() -
смещение фаз 1-й и 2-й гармоник.
-
смещение фаз 1-й и 2-й гармоник.
![]()
![]()
где
![]()
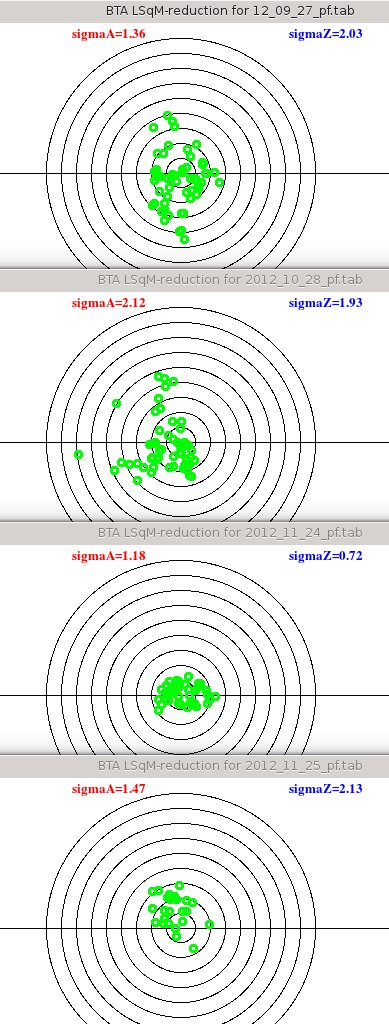
Результат аппроксимации этими формулами по программе zeiss_lsqm :
202 experimental points. All used for LSqM. IH ID CH NP MA ME TF DAF GWH GWH2 GWD GWD2 -99.12 17.42 142.60 19.73 -19.37 -59.81 -9.18 103.88 31.70 5.35 12.21 -4.45 0.68 0.90 1.53 1.23 0.54 1.44 2.16 2.37 1.06 1.23 3.00 1.20 Sigma=5.14 (SigmaHA=3.13,SigmaDec=4.08) ------------------------------------------------------------------------------ N HA Decl dHA*cosD dha*cosD ddha*cosD dDec ddec dddec 1 20.09 +0.0 -12.0 -14.5 +2.5 -17.3 -25.1 +7.8 2 20.64 +0.0 -12.0 -14.0 +2.0 -17.2 -25.1 +7.9 3 20.49 +20.0 -19.4 -23.6 +4.1 -32.3 -29.4 -2.9 4 20.57 +40.0 -9.4 -13.2 +3.8 -36.7 -35.6 -1.1 5 20.48 +60.0 +18.8 +15.7 +3.2 -41.1 -42.0 +0.9 . . . . . . . . . . . . . . . . . . . . . 199 60.21 +29.9 -3.1 -0.9 -2.1 -11.3 -14.6 +3.3 200 90.24 +29.8 +10.9 +21.4 -10.5 +17.3 +14.5 +2.8 201 1.19 +29.7 -23.3 -24.3 +1.0 -28.5 -29.9 +1.4 202 0.30 +0.1 -31.6 -30.8 -0.8 -23.8 -22.2 -1.6
На рисунках графическое представление аппроксимации таблицы поправок по HA и Decl:
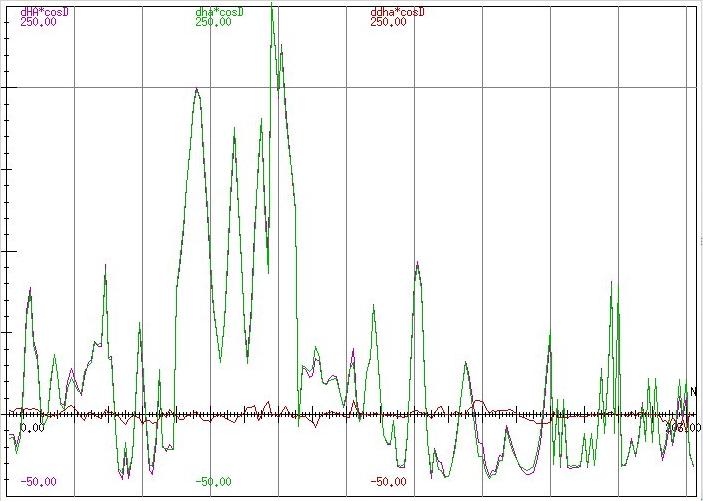
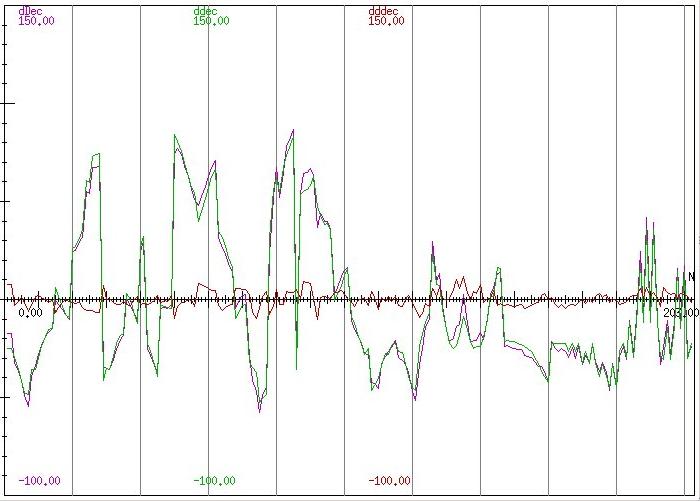
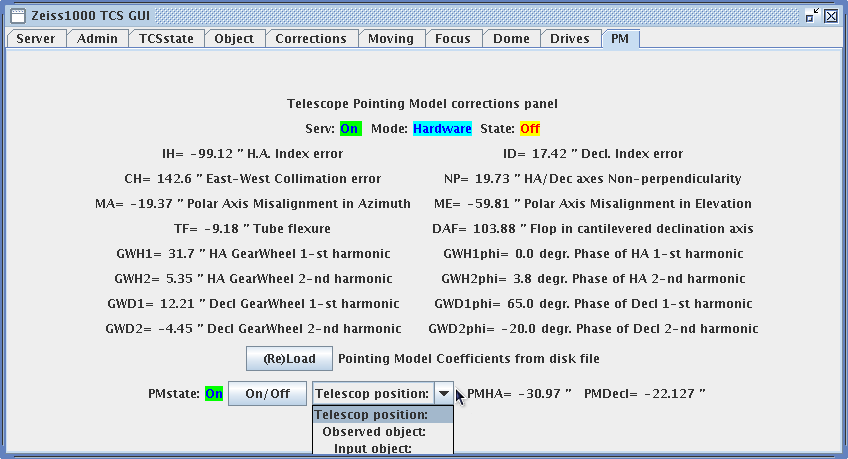
Найденные формулы реализованы в МО новой системы управления. Коэффициенты загружаются из файла при старте системы. В сетевой интерфейс сервера добавлены команды запроса состояния системы коррекции, ее подключения/отключения, перезагрузки коэффициентов.
Разработана соответствующая панель в Java-клиент.
 На
телескопе до сих пор стоят старые датчики
угла с низким разрешением и надежностью,
кроме того их самодельный интерфейс
несовместим с новыми компьютерами. Для
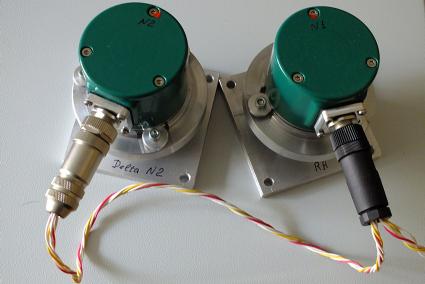
их замены в этом году были закуплены
угловые датчики фирмы FRABA.
Они
подключаются прямо к CAN-шине. Протокол
доступа — CANopen (DS301V4.0 Profile:DS406, C6-class).
На
телескопе до сих пор стоят старые датчики
угла с низким разрешением и надежностью,
кроме того их самодельный интерфейс
несовместим с новыми компьютерами. Для
их замены в этом году были закуплены
угловые датчики фирмы FRABA.
Они
подключаются прямо к CAN-шине. Протокол
доступа — CANopen (DS301V4.0 Profile:DS406, C6-class).
Для подключения этих датчиков к системе управления выполнялись следующие работы:
доработка системы доступа к CAN-шине для возможности параллельно отслеживать весь обмен по ней;
разбор по документации деталей протокола CANopen/DS406, исследование вариантов работы на совместимость с протоколом SEW-приводов, разработка C-библиотеки минимально необходимых функций;
разработка программы can_encoder для тестирования и реконфигурации параметров датчиков;
подготовка с ее помощью двух датчиков для работы в режиме SYNC на осях HA и Decl;
разработка Java-класса обмена с датчиками в новую систему управления;
лабораторные испытания при работе системы с двумя датчиками и двумя SEW-приводами.
Окончательная проверка будет возможна только после реальной установки датчиков на телескопе.
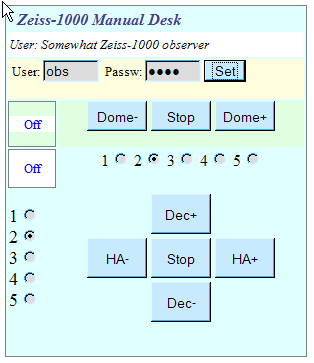 Для
того чтобы была возможность управлять
телескопом и куполом во время технических
работ в подкупольном пространстве
выполнена разработка Web-приложения
через которое браузер может напрямую
взаимодействовать с сервером системы
управления.
Для
того чтобы была возможность управлять
телескопом и куполом во время технических
работ в подкупольном пространстве
выполнена разработка Web-приложения
через которое браузер может напрямую
взаимодействовать с сервером системы
управления.
Предполагается использование мобильных гаджетов с WiFi.
Приложение написано на Javascript с использованием Ajax для доступа к XML-RPC серверу телескопа. Проверено на основных браузерах в Linux, Windows, Android, iOS.
Поскольку современные браузеры по соображениям безопасности блокируют подобные «крос-серверные» обращения из Javascript, необходимо чтобы в сервере было реализовано дополнение HTTP-протокола CORS (Cross-Origin Resource Sharing).
К сожалению в используемом Apache XML-RPC эта опция отсутствует. Java-класс org.apache.xmlrpc.webserver.Connection был мной исправлен с включением поддержки CORS и пока загружается поверх основной библиотеки.